Motor:
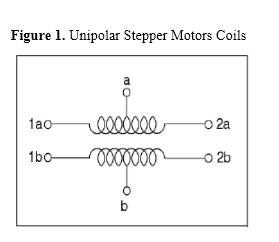
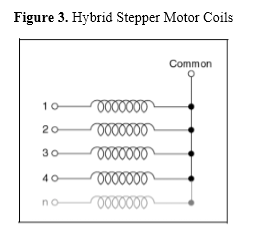
Unipolar stepper motor

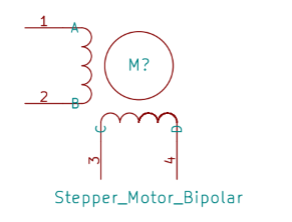
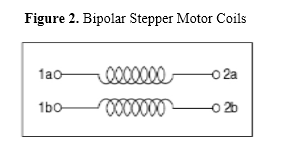
Bipolar Stepper Motor
Step Angle
Driving Unipolar Stepper
Full Step
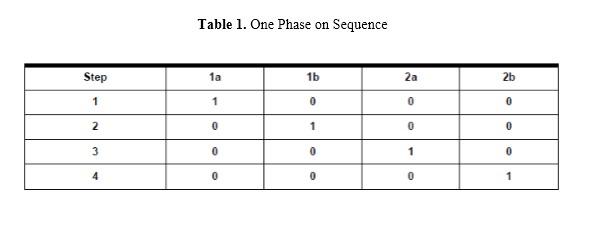
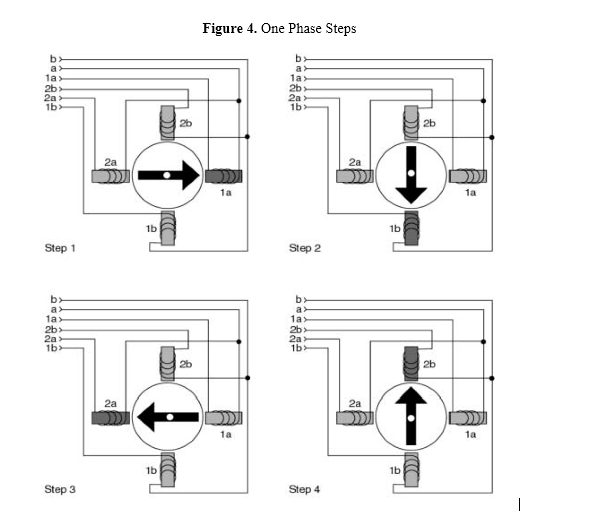
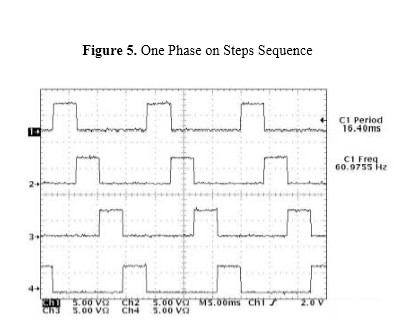
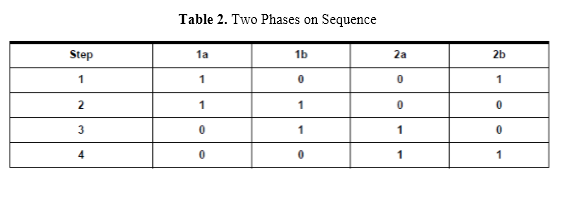
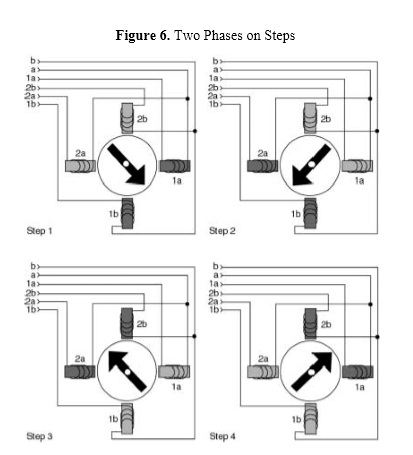
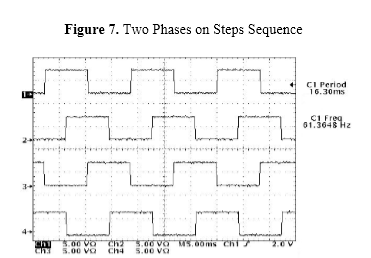
Two Phases on Mode
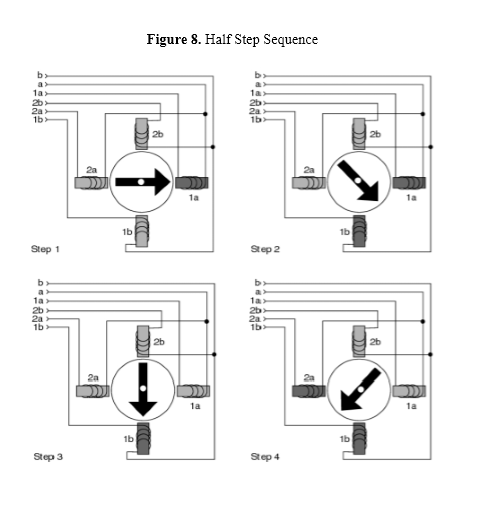
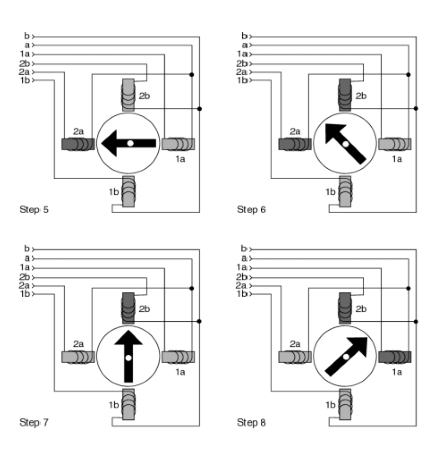
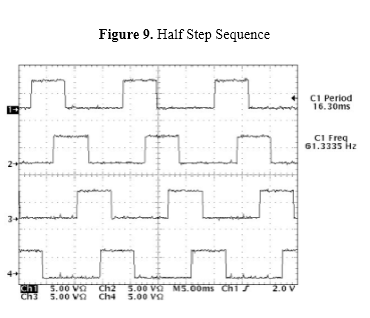
Half Step Mode

Micro step
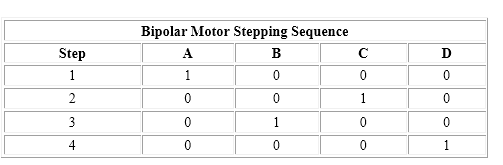
Driving Bipolar Stepper
Advantages
Applications
/* Name : unipolar_FS.c
* Purpose : Source code for Unipolar Fullstep Stepper Motor with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-29
* Website : www.gemicates.org
* Revision : None
*/
/**** Full step drive Mode****/
#include <htc.h> // Header file for PIC18F4550 series
#define _XTAL_FREQ 12000000 // 12MHz Crystal Frequency for PIC18F4550
void delay_ms(); // delay declaration
unsigned int i;
void main() // main fuction
{
PORTD = 0;
TRISD = 0; // Configure PORTD as output
while(1) { // loop executed infinite times
for(i=0;i<49;i++)
{
PORTD=0x09; // 1001
__delay_ms(60); // delay
}
for(i=0;i<49;i++)
{
PORTD=0x0C; //1100
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x06; //0110
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x03; //0011
__delay_ms(60);
}
}
}
/* Name : unipolar_HS.c
* Purpose : Source code for Unipolar Halfstep Stepper Motor with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-29
* Website : www.gemicates.org
* Revision : None
*/
/**** Half Drive Stepping Mode ****/
#include <htc.h> // Header file for PIC18F4550 series
#define _XTAL_FREQ 12000000 // 12MHz Crystal Frequency for PIC18F4550
void delay_ms(); // delay declaration
unsigned int i;
void main() // main fuction
{
PORTD = 0;
TRISD = 0; // Configure PORTD as output
while(1) { // loop executed infinite times
for(i=0;i<49;i++)
{
PORTD=0x08; // 1000
__delay_ms(60); // delay
}
for(i=0;i<49;i++)
{
PORTD=0x0C; // 1100
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x04; // 0100
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x06; // 0110
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x02; // 0010
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x03; // 0011
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x01; // 0001
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x09; // 1001
__delay_ms(60);
}
}
}
/* Name : unipolar_FS.c
* Purpose : Source code for Unipolar wave drive Stepper Motor with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-29
* Website : www.gemicates.org
* Revision : None
*/
/**** Wave Drive Stepping Mode****/
#include <htc.h> // Header file for PIC18F4550 series
#define _XTAL_FREQ 12000000 // 12MHz Crystal Frequency for PIC18F4550
void delay_ms(); // delay declaration
unsigned int i;
void main() // main fuction
{
PORTD = 0;
TRISD = 0; // Configure PORTD as output
while(1) { // loop executed infinite times
for(i=0;i<49;i++)
{
PORTD=0x08; // 1000
__delay_ms(60); // delay
}
for(i=0;i<49;i++)
{
PORTD=0x04; //0100
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x02; //0010
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD=0x01; //0001
__delay_ms(60);
}
}
}
/* Name : bipolar.c
* Purpose : Source code for Bipolar Stepper Motor with PIC18F4550.
* Author : Gemicates
* Date : 2017-06-28
* Website : www.gemicates.org
* Revision : None
*/
/**** Program to interface Bipolar Stepper Motor with PIC18F4550 ****/
#include <htc.h> // Header file for PIC18F4550 series
#define _XTAL_FREQ 12000000 // 12MHz Crystal Frequency for PIC18F4550
void delay_ms(); // delay declaration
unsigned int i;
void main() // main fuction
{
TRISD = 0b0000000; // PORT D as output port
PORTD = 0b0000000;
while(1) { // loop executed infinite times
for(i=0;i<49;i++)
{
PORTD= 0b00000001; // 0001
__delay_us(60); // delay
}
for(i=0;i<49;i++)
{
PORTD= 0b00000100; //0100
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD = 0b00000010; //0010
__delay_ms(60);
}
for(i=0;i<49;i++)
{
PORTD = 0b00001000; //1000
__delay_ms(60);
}
}
}